언어 변경 :
로봇용 구면 베어링
고성능 플라스틱 구면 베어링으로 움직임 전달
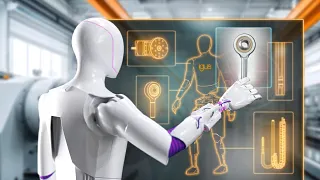
로봇 산업은 빠르게 발전하고 있으며, 새로운 애플리케이션마다 움직이는 부품에 대한 새로운 요구사항이 등장하고 있습니다. 이 과정에서 구면 베어링은 핵심적인 역할을 수행합니다. 자유도(DoF)를 구현하고 복잡한 키네마틱 구조를 가능하게 합니다. igubal® 구면 베어링은 부품 간 안정적인 연결을 구현하고, 설계자가 유지보수 부담 없는 내구성과 구조적 효율성을 갖춘 움직임을 구현할 수 있도록 지원합니다.
igubal의 장점
- 유지보수 불필요 – 윤활 없이 사용 가능
- 자동 조심형 베어링
- 경량 설계 – 동적 애플리케이션에 최적
- 내부식성
- 내분진성
- 표준 제품 및 맞춤형 솔루션 제공 가능
format_color_reset
무급유
construction
유지보수 불필요
cloud
경량
waves
진동 흡수
invert_colors
내부식성
volume_off
저소음
로봇 동작별 솔루션 가이드
로봇 분야에서 이구스는 단순히 부품이 아닌 움직임 자체를 설계합니다. 아래 개요에서는 대표적인 동작 유형과 이에 적합한 igubal 구성 요소를 확인하실 수 있습니다.
| 동작 유형 | 적합한 igubal® 구성 요소 | 설계상 장점 | 대표 적용 분야 |
|---|---|---|---|
| 피봇 동작 | 구면 베어링, 더블 조인트, 플라스틱 로드 엔드, 플라스틱 이너 레이스 적용 금속 로드 엔드, 커플링 조인트 | 각도 오차를 보정하고 하중 조건에서도 안정적인 움직임 구현 | 휴머노이드 로봇, 로버 섀시, 보행 로봇 |
| 힘 전달 (Push / Pull) | 커플링 조인트, 축방향 조인트, 로드 엔드 | 움직임 자유도를 유지하면서 안정적인 동력 전달 구현 | 액추에이터 연결부, 다리 메커니즘, 직선 운동 시스템 |
| 회전 베어링 | 플랜지 베어링, 필로우 블록 베어링, 구면 인서트 베어링, 구면 볼 | 연속 작동 환경에서도 사용 가능한 컴팩트 무급유 베어링 | 샤프트 베어링, 휠, 회전 메커니즘 |
| 다중 조인트 키네마틱 | 커플링 조인트, 더블 조인트, 로드 엔드 | 높은 자유도와 정밀한 움직임 제어 | 평행사변형 키네마틱, 그리퍼 메커니즘, 생체모사 메커니즘 |
| 경량 구조와 고동적 움직임 | 소형 구면 베어링 및 로드 엔드 | 경량 구조를 통해 구동력을 줄이고 동적 성능을 향상 | 드론 메커니즘, 모바일 로봇, Pick & Place 시스템 |
| 오염 및 외부 환경에서도 안정적인 움직임 | 전체 igubal® 제품군 | 무급유 설계와 함께 먼지, 습기 및 부식 환경에서도 안정적인 성능 제공 | 로버, 구조 로봇, 농업 및 실외 애플리케이션 |
| 컴팩트한 피벗 포인트 | 소형 구면 베어링 및 로드 엔드 | 높은 기능성과 공간 효율성을 동시에 구현 | 협소한 설치 공간, 초소형 메커니즘, 센서 및 카메라 마운트 |
휴머노이드 로봇 핸드
금속 대신 플라스틱 로드 엔드를 적용해 휴머노이드 로봇 핸드의 손가락 키네마틱 성능을 최적화합니다.
더 많은 로봇 애플리케이션 보기




로봇용 유니버설 조인트

구면 베어링이 주로 피벗 동작을 구현한다면, 유니버설 조인트는 두 축 간 각도 변화가 발생하는 상황에서도 회전 운동을 전달하는 역할을 수행합니다. 로봇 분야에서는 회전 운동을 동일 축상으로 전달할 수 없는 환경에서 사용됩니다. 이를 위해 두 가지 서로 다른 설계 방식이 개발되었습니다.
Humanoid Report 2027
휴머노이드 로봇은 더 이상 미래의 개념이 아닙니다. 하지만 이것이 여러분의 산업, 경쟁력, 그리고 무엇보다 미래에는 어떤 의미를 가질까요? 백서 Humanoid Report 2027에서는 많은 사람들이 예상하는 것보다 더 빠르게 현실화될 미래 기술과 최신 개발 동향에 대한 인사이트를 확인하실 수 있습니다.