언어 변경 :
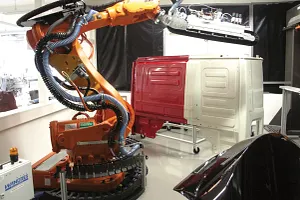
자동차 산업의 6축 로봇을 위한 3D 에너지 체인
이전에 공장에서 사용하던 보호 호스가 찢어져 생산 중단으로 이어져 많은 비용이 발생했습니다.
개조 공정을 통해 6축 로봇의 모든 축에 다차원적으로 움직이는 에너지 체인이 장착되었습니다. 모든 이동 중에 케이블과 호스를 안내하고 보호하는 3D 체인 외에도 전체 로봇 액세서리 패키지에는 방향 프리텐션용 스프링 로드, 어댑터, 프로텍터 및 회전 이동용 체인도 포함되어 있습니다. 그 이후로 더 이상 다운타임은 없었습니다.




상담
문의사항에 개별적으로 답변해 드리겠습니다.
igus® Korea 한국이구스032-821-2911이메일 작성
배송 및 상담
개인별:
월~금 오전 9시 - 오후 6시.
온라인:
24시간