저비용 자동화 솔루션에 대해 자세히 알아보기
이구스의 모듈형 개념에서 파생된 높은 유연성은 저비용 자동화를 전 세계에 적용될 수 있습니다. 어플리케이션에 따라 조립 키트로 고객 맞춤형 솔루션을 만들 수 있고, 다른 제품으로 보완할 수 있습니다. 기존 또는 방수형 이구스 스텝 모터 이외에, 로봇 조인트를 다른 모터나 공압 드라이브에 연결할 수 있습니다. 조인트 조립 키트는 어떤 특수한 제어 시스템에도 얽매이지 않으므로 가장 자유롭게 자동화 공정을 계획 및 구현할 수 있습니다.

robolink® 창고 지원
robolink®의 개별 부품을 적절한 창고 선반에 올려 놓을 수 있음robolink® 창고 지원
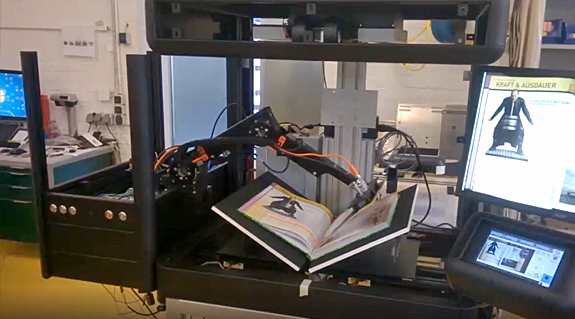
자동화 북 스캐너
북 스캐너에 사용되는 페이지를 넘겨주는 robolink®자동화 북 스캐너
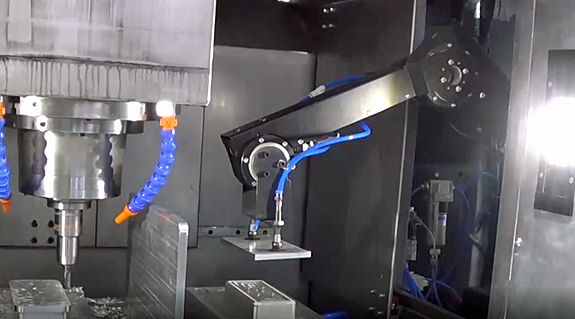
공작 기계
robolink®는 공작 기계에서 구성품을 제거함공작 기계
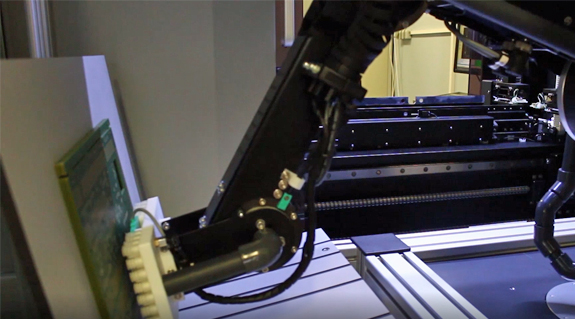
인쇄회로기판의 품질 관리
테스트 장치에 인쇄회로기판을 배치하는 robolink인쇄회로기판의 품질 관리

인공호흡기 자동화 포장
인공호흡기 자동화 포장인공호흡기 자동화 포장

부분 자동화 머신 확장
부분 자동화 머신 확장자동화 기계 확장

_135x135.png)