robolink® W FAQ – 로봇용 조인트 조립 키트
자주 묻는 질문(FAQ)
1) 어떤 유형의 igus® 조인트가 재고 발송 가능합니까?
현재 표준 조인트는 6개가 있습니다.
1 – RL-50-PL1: 피봇 조인트2 – RL-50-TL1: 회전 조인트
3 – RL-50-001: 피봇팅 범위가 +/-90°인 2축 조인트("THE 클래식")
4 – RL-50-002: 피봇팅 범위가 +130°/-50°인 2축 조인트("비대칭")
5 – RL-50-003: 피봇팅 범위가 +180°/0°인 2축 조인트("폴더형")
6 – RL-90-BL1: 축이 2개인 베이직 조인트("더 크고 더 강함")
또한 필요한 경우 특수 버전의 조인트를 공급할 수있습니다.
2) 어떤 각도 설정이 가능합니가? 자체 중량은? 토크는?
다음 목록은 기본 데이터 정보를 제공합니다. 이 표는 당사 카탈로그에서도 찾아볼 수 있습니다.| 주문 번호 | 케이블 수 |
피봇팅 각도 |
회전 각도 |
중량 | 최대 하중 | ||||
|---|---|---|---|---|---|---|---|---|---|
| 자체 구동 |
리드 쓰루 가능 |
표준형 ( 스톱 독 포함) |
옵션 (* 스톱 독 제외) |
표준형 ( 스톱 독 포함) |
옵션 (* 스톱 독 제외) |
[gr] | 피봇팅 [Nm] |
회전 [Nm] |
|
| 1. 피봇 조인트 RL-50-PL1 |
2 | 4 | 180° (±90°) | 210° (±105°) |
- | - | 235 | 12 | - |
| 2. 회전 조인트 RL-50-TL1 |
2 | 8 | - | - | 340° (±170°) |
540° (±270°) |
245 | - | 5 |
3. 2축 |
4 | 4 | 180° (±90°) |
210° (±105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
4. 2축 |
4 | 4 | 180° (+130°/-50°) |
240° (+135°/-105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
| 5. 2축 조인트 RL-50-003 |
4 | 4 | 180 ° (+180°/0°) |
235° (+180°/-55°) |
340° (±170°) |
540° (±270°) |
400 | 12 | 5 |
| 6. 베이직 조인트 RL-90-BL1 |
4 | 8 | 180° (±90°) |
190° (±95°) |
180° (±90°) |
- | 1250 | 20 | 10 |
3) 조인트는 어떻게 조립할 수 있습니까?
각각의 개별 조인트에는 드로우 와이어가 장착되어 있습니다. 각 드로우 와이어는 아래에 있는 조인트를 관통하여 장착해야 합니다. 그 이외에 조인트는 다른 조합이 가능하지 않습니다. 그러나 1 ~ 6 DOF로 개별 조인트를 결합하여 매우 다양한 구동부를 구현할 수 있습니다. 친절하게 상담해 드리겠습니다. 다음 그림은 몇 가지 적합한 조합을 보여줍니다. 새로운 유형의 조인트(예: RL-50-003 및 RL-90-BL1)를 적용 하신다면 더 많은 가능성이 있습니다!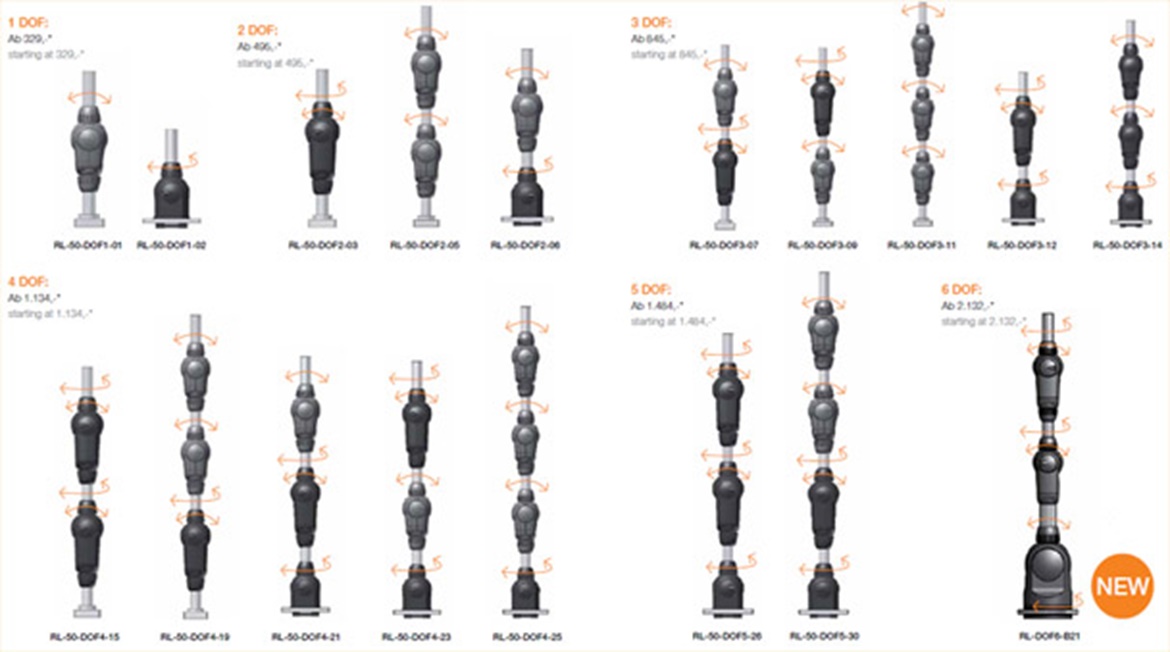
4) "모듈형 키트 시스템"은 무엇을 의미합니까?
robolink® 모듈형 구성 키트의 기본 개념은 고객에게 로봇 시스템 구축에 사용 가능한 개별 (기계) 구성품을 공급하는 것입니다. 구성품이 얼마나 복잡한지에 따라 다양하고 복잡한 다관절 암을 구성 및 주문할 수 있습니다. igus®는 고객의 요구에 따라 암을 제작하고 바로 연결 가능한 장치를 납품합니다. 그러나 개별 조인트를 "LEGO® 블럭처럼" 단순히 결합하는 것은 불가능합니다.5) 다관절 암의 수정은 왜 어렵습니까?
모든 조인트는 드로우 와이어로 작동됩니다. 각각의 DOF에는 2개의 와이어가 필요합니다 (대칭 원리). 상부 조인트(2)의 와이어가 가이드 없이 하부 조인트(1)를 통해 연결될 경우 두 조인트의 동작은 더 이상 서로 독립성을 갖지 못합니다. 독립성을 이루기 위해서는 상부 조인트 (2)의 와이어 장력이 하부 조인트 (1)의 동작과 분리되어야 합니다. 이러한 독립성은 하부 조인트의 개구부에 있는 특수 Bowden 케이블 시스템에 의해 이루어집니다 (그림 참조). 와이어는 조인트 사이에 튜브를 연결할 경우 서로 옆에서 자유롭게 움직입니다.igus의 다관절 암을 주문할 경우 모든 Bowden 케이블 요소가 미리 장착되며, 일체형 시스템이 항상 바로 연결 가능한 상태로 배송됩니다 (예: 원하는 구성에 모든 와이어와 튜브가 포함된 경우).

공압 호스(그리퍼)
2Bowden 4중 케이블
3센서 케이블 - 조인트 2
44개의 와이어가 튜브 속에서 자유롭게 움직임
5Bowden 회전 단일 케이블
68개의 와이어가 튜브 속에서 자유롭게 움직임
6) 조인트를 이동하려면 어느 정도의 와이어 거리/힘이 필요합니까?
조인트 내부 와이어의 작동점은 지정된 크기로 정의됩니다.RL-50: 유효 직경 50mm(회전 및 피봇팅 동작)
RL-90: 유효 직경 90mm(피봇팅 동작) 또는 120mm(회전 동작)
RL-50 조인트의 와이어 거리는 따라서 다음과 같이 계산됩니다.
π x d/4 ≈ 39mm(각도 동작이 90°인 경우)
π x d/2 ≈ 79mm(각도 동작이 180°인 경우)
와이어의 견인력(적용되는 토크에 따라 다름)은 최대 600N이 될 수 있습니다.
7) 조인트의 공급 범위에는 무엇이 포함됩니까?
조립된 플라스틱(PA 2200) 재질 조인트, 베어링 위치(경질 양극 산화 처리 알루미늄 = 표준) 포함
Dyneema 와이어
알루미늄 봉 (표준 = 100mm, 요청 시 각 경우에 특수 길이 포함)
각도 센서 옵션 (-WS), 3m 센서 와이어, 장착 및 테스트 완료. 고객의 동의가 있을 경우 와이어 니플 연결 재질 무료 적용.
8) 다관절 암의 공급 범위에는 무엇이 포함됩니까?
포인트 7)에 따라 사전 조립된 모든 조인트
포인트 5)에 따라 특수한 Bowden 케이블 세그먼트들과 연결된 모든 와이어
조인트 사이의 알루미늄 튜브, 고객의 희망에 따른 맞춤형 솔루션
암 베이스의 마운팅 플레이트
연결된 센서 와이어(옵션 -WS), 각 경우에 3m 센서 와이어 장착 및 테스트 완료. 고객의 동의가 있을 경우 와이어 니플 연결 재질 무료 적용.
9) "일체형 시스템"의 공급 범위에는 무엇이 포함됩니까?
질문 6)에 명시된 다관절 암, MIT 구동장치 구성요소:igus® 스텝 모터, 암의 축과 수 일치
각 모터의 유성 기어박스
와이어를 드라이브에 연결하는 "드라이브 휠"
드라이브 휠의 재인장이 용이한 "인장 도구"
모터와 암이 장착되는 다양한 버전의 하우징 사용 가능
다음은 포함되지 않습니다.
그리퍼 (igus®에서 선택적으로 사용 가능, 기타 제품도 적용 가능)
제어 구성품
모터 케이블 (igus®에서 선택적으로 사용 가능)
10) 어떤 각도 센서가 사용됩니까?
조인트에는 Austriamicrosystems (AS5304A) 증분 각도 센서가 있습니다 (옵션). 최적 인코더는 현재 기술적인 이유로 사용이 어렵습니다. 영점 위치를 설정하기 위해 당사는 조인트의 피봇팅/회전 범위 중앙에 위치한 홀 센서를 이용합니다. 그래서 전원이 켜지면 각 조인트는 우선적으로 "초기화"되어야 합니다. 당사 기술 자료의 센서 배선 및 와이어 배열에 대한 추가 정보입니다.인코더 해상도 (조인트에 따라 다름!):
조인트 크기 RL-50의 모든 회전 동작이 4,640 signals / 360°인 경우
(29 pole pairs x 160 signal / pole pair) ≈ 0.078°
조인트 크기 RL-50의 모든 피봇팅 동작이 4,960 signals / 360°인 경우
(31 pole pairs x 160 signals / pole pair) ≈ 0.073°
조인트 크기 RL-90("베이스")의 모든 동작이 9,920 signals / 360°인 경우
(62 pole pairs x 160 signals / pole pair) ≈ 0.036

회전 동작 홀 센서
2회전 동작 인코더
3피봇팅 동작 인코더
4회전 동작 홀 센서
자기 증분 각도 센서. 센서의 축당 해상도는 ~0.07°입니다. 모든 센서 장치는 각 조인트에 바로 설치 가능하며, 각 조인트에는 3m 센서 케이블이 있습니다(DOF마다 6개 리드).
11) 관절암은 수중에서도 사용할 수 있습니까?
예. 구성품은 기본적으로 플라스틱(PA2200), 양극 산화 처리 알루미늄, 스테인리스 스틸(나사), Dyneema 와이어(PE), 황동 와이어 니플로 구성됩니다. 성형된 센서를 주문할 수 있습니다(-SE = 밀봉된 인코더).

12) 어떤 유형의 드라이브를 사용할 수 있습니까?
매우 다양한 드라이브를 사용하여 와이어를 움직일 수 있습니다. 예를 들어 수동 드라이브 ("레버"), 공압 구성품 (예: 공압 근육) 또는 전기 모터 (BLDC 모터, DC 모터, 서보 모터, 직동 모터, 스텝 모터)가 가능합니다. igus®는 구동 개념으로 유성 기어박스가 포함된 스텝 모터를 공급할 수 있습니다. 다음을 사용할 수 있습니다.- NEMA23 스텝 모터(표준 와이어 또는 커넥터 버전), 1:16 유성 기어박스
- NEMA17 스텝 모터(표준 와이어 또는 커넥터 버전), 1:35 유성 기어박스
스텝 모터
2유성 기어박스
3텐션형 드라이브 휠

13) robolink® 다관절 암은 어떻게 제어합니까?
igus®는 컨트롤 구성품을 개발, 조립 또는 판매하지 않습니다. robolink® 시스템의 공급 범위는 다관절 암 또는 "구동 장치"를 갖춘 다관절 암에 제한되어 있습니다.제어 구성품은 고객이 제공하거나 구매해야 합니다.
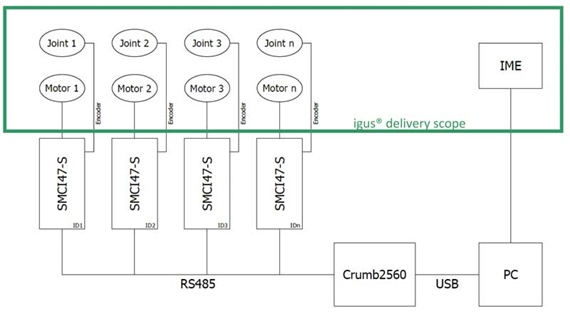
14) igus®의 오픈 소스 소프트웨어 IME(igus® 모션 에디터)를 사용할 수 있으려면 어떻게 해야 합니까?
본 소프트웨어는 무료로 다운로드할 수 있습니다. 본 소프트웨어는 간단한 동작을 프로그래밍하고 저장할 수 있는 그래픽 사용자 인터페이스 형태입니다. 윤곽 제어 시스템 (또는 역 구동부)은 포함되지 있지 않습니다.15) 어떤 재질이 사용됩니까?
조인트: 폴리아미드 PA 2200 구성품, 스테인리스 스틸 나사, 경질 양극 산화 처리 알루미늄 재질 베어링 링, iglidur® J 또는 스테인리스 스틸.연결 튜브: 양극 산화 처리 알루미늄, GRP 또는 CRP
와이어:Dyneema 와이어, 황동 재질 와이어 엔드 니플.
16) 어떤 그리퍼를 사용할 수 있습니까?
"범용" 그리퍼를 당사의 다관절 로봇 암과 조합할 수 있습니다. 시스템의 하중 베어링 용량이 상대적으로 낮기 때문에 그리퍼는 가능한 가벼워야 합니다. SCHUNK, FESTO 또는 FIPA와 같은 회사의 다양한 경량 공압 그리퍼가 시중에서 판매됩니다. 종종 있는 경우지만 공압 구성품의 사용이 바람직하지 않을 경우, 전기 그리퍼가 필요합니다. GIMATIC, SCHUNK 또는 SOMMER와 같은 회사의 매우 가벼운 전기 그리퍼가 시중에서 판매됩니다 (간단한 공압 그리퍼보다 매우 고가). 2013년부터 igus®는 robolink® 튜브에 전기 모터가 장착된 간단한 플라스틱 그리퍼를 공급하고 있습니다. 옵션으로 그리퍼 조(jaws)를 개별 설계할 수도 있습니다.17) 조인트나 "시스템"은 얼마입니까?
개별 조인트 및 시스템의 가격은 모두 당사 카탈로그에 명시되어 있습니다. 경험에 따르면, 모터, 기어박스, 하우징, 조인트 및 센서가 포함된 "일체형 시스템"은 축당 1,000유로가 약간 넘습니다. 즉, 6 DOF 시스템에서는 약 6,000유로가 소요됩니다. 모터가 없는 (센서 포함) 다관절 암의 가격은 약 1/2 정도입니다 (축당 500유로). 예시:6 DOF ~ 3,000유로

6 DOF ~ 6,000유로


_135x135.png)